滑鐵盧大學的一個工程師團隊開發了一種微型機器人,它最終可以幫助醫生進行手術。該機器人的靈感來自壁虎的抓握能力和尺蠖的高效運動能力。
該研究發表在 Cell Reports Physical Science.
Maneuver with UV and Magnetic Force
機器人使用紫外線(UV)光和磁力可以在任何表面上移動,包括牆壁和天花板。它是同類產品中第一款不需要連接外部電源的軟體機器人,可實現遠程操作和多功能性。由於這些功能,該機器人可用於協助外科醫生和搜索難以進入的地方。
博士。趙伯新是化學工程教授。
“這項工作是整體軟體機器人首次在倒置表面上爬行,推動了最先進的軟體機器人創新,”他說。 “我們對它的潛力持樂觀態度,它在多個不同領域都有更多的發展。”
該團隊以激發其設計靈感的生物命名機器人 GeiwBot。它由智能材料構成,可以在分子水平上進行改變,以模仿壁虎如何在腳上附著和分離強大的抓手。
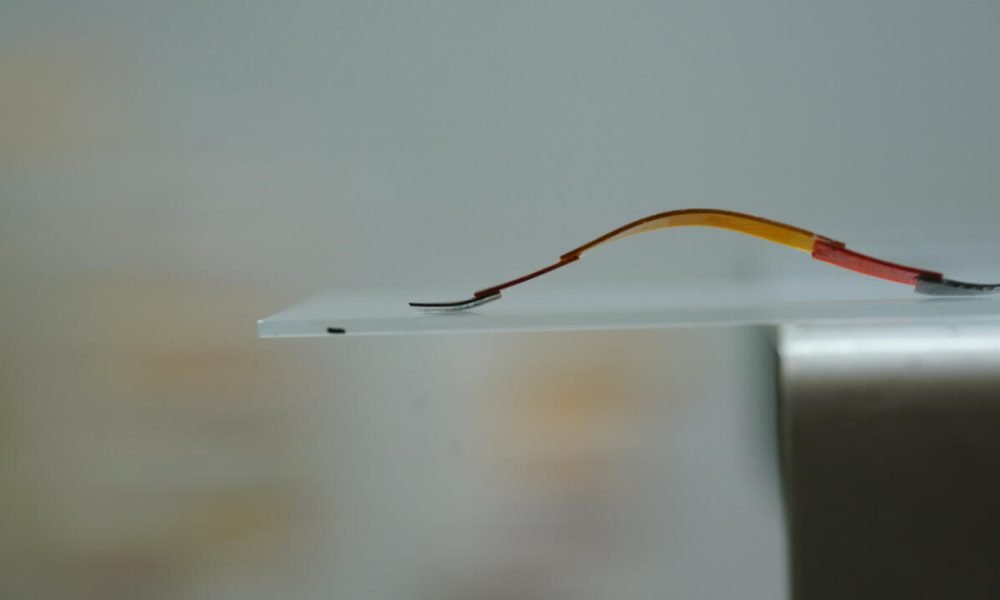
創造微型機器人
該機器人的長度僅為 4 厘米,寬度為 3 毫米,厚度為 1 毫米,無需電源即可攀爬垂直牆壁和穿越天花板。該機器人是使用液晶彈性體和合成粘合墊製成的。它結合了模仿尺蠖的拱形和伸展運動的光敏聚合物條,而兩端的受壁虎啟發的磁墊提供了抓握能力。
Zhao 還是滑鐵盧大學納米技術基金會主席.
“儘管仍有一些限制需要克服,但這一發展代表了將仿生學和智能材料用於軟體機器人的一個重要里程碑,”趙說。 “大自然是靈感的重要來源,而納米技術是應用其經驗教訓的令人興奮的方式。”
通過開發不受束縛的軟體機器人,研究人員正在為通過在人體內進行遠程操作的潛在手術應用鋪平道路身體。他們還在幫助創造可用於在救援行動期間在危險或難以到達的地方進行感應或搜索的技術。
該團隊現在將尋求開發一種單獨驅動的攀爬軟體機器人通過光並且不需要磁場。該機器人還將使用近紅外輻射代替紫外線,這可以提高生物相容性。