東京理科大學教授 Eiichi Yoshida 提出了一個有趣的交互式網絡物理人 (iCPH) 的想法。
人類可以自然地執行各種複雜的任務,例如坐下和採摘上項目。然而,這些活動涉及各種動作並需要多次接觸,這對機器人來說可能很困難。 iCPH 可以幫助解決這個問題。
理解和生成類人系統
新平台可以幫助理解和生成類人系統,使用各種接觸豐富的全身運動。
作品發表於Frontiers in Robotics and AI。
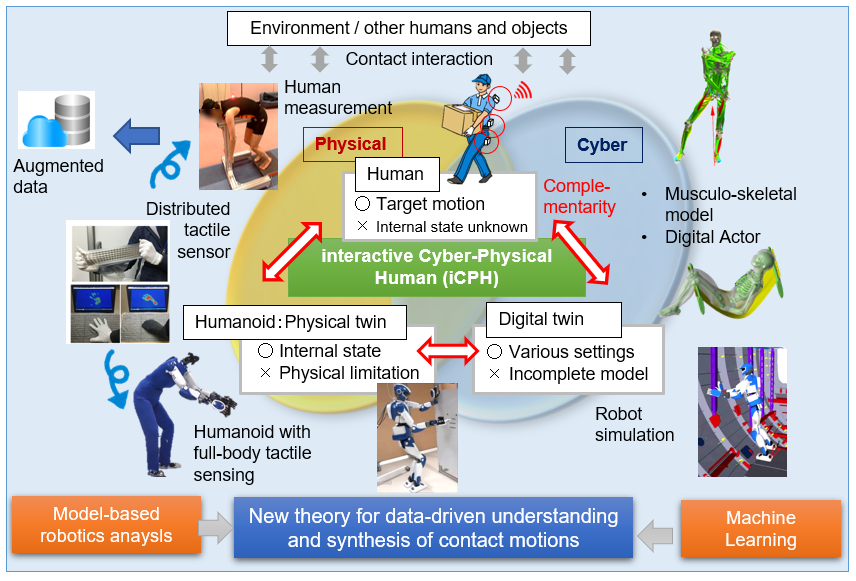
“正如名字建議,iCPH 結合了物理和網絡元素來捕捉人體動作,”吉田教授說。 “雖然類人機器人充當人類的物理雙胞胎,但數字雙胞胎作為網絡空間中的模擬人或機器人存在。後者是通過肌肉骨骼和機器人分析等技術建模的。這兩個雙胞胎互補。”
Prof. Yoshida 用該框架解決了幾個問題,例如:
類人動物如何模仿人類的概念?機器人如何學習和模擬人類行為?機器人如何與人類順暢自然地互動?
iCPH 框架
iCPH 框架的第一部分通過量化身體各部位的運動來測量人體運動。它還記錄了人類進行的接觸序列。
該框架能夠通過微分方程對各種運動進行通用描述,並生成接觸運動網絡。然後,人形機器人可以對該網絡採取行動。
當涉及到數字孿生時,它通過基於模型和機器學習的方法來學習網絡。這兩者通過分析梯度計算方法連接,持續學習有助於教會機器人模擬如何執行接觸序列。
iCPH 的第三部分通過數據擴充在應用之前豐富了接觸運動網絡矢量量化技術。該技術有助於提取表達接觸運動語言的符號,從而能夠在沒有經驗的情況下生成接觸運動。
所有這些都意味著機器人可以探索未知環境,同時通過使用流暢的運動和許多接觸與人類進行交互。
教授Yoshida 為 iCPH 提出了三個挑戰,這些挑戰與一般描述符、持續學習和接觸運動的符號化有關。要實現 iCPH,它必須學會如何導航*。*
“來自 iCPH 的數據將公開並部署到現實生活中,以解決社會和工業問題。人形機器人可以將人類從許多涉及沉重負擔的任務中解放出來,並提高他們的安全性,例如舉起重物和在危險環境中工作,”吉田教授說。 “iCPH 還可用於監控人類執行的任務並幫助預防與工作相關的疾病。最後,類人機器人可以通過數字孿生被人類遠程控制,這將使類人機器人能夠承擔大型設備安裝和物體運輸。”