O professor Eiichi Yoshida, da Universidade de Ciências de Tóquio, apresentou uma ideia intrigante de um humano ciberfísico interativo (iCPH).
Os humanos podem realizar naturalmente várias tarefas complexas, como sentar e escolher itens para cima. No entanto, essas atividades envolvem vários movimentos e exigem múltiplos contatos, o que pode ser difícil para os robôs. O iCPH pode ajudar a resolver esse problema.
Entendendo e gerando sistemas semelhantes aos humanos
A nova plataforma pode ajudar a entender e gerar sistemas semelhantes aos humanos que usam uma variedade de movimentos de corpo inteiro ricos em contato.
O trabalho foi publicado em Frontiers in Robotics and AI.
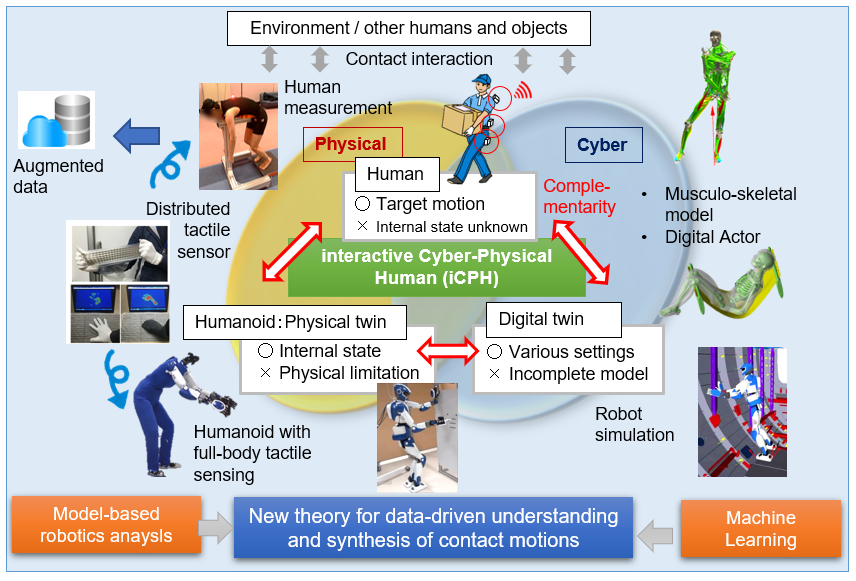
“Como o nome sugere, o iCPH combina elementos físicos e cibernéticos para capturar movimentos humanos”, diz o Prof. Yoshida. “Enquanto um robô humanóide age como um gêmeo físico de um humano, um gêmeo digital existe como um humano ou robô simulado no ciberespaço. Este último é modelado por meio de técnicas como análise musculoesquelética e robótica. As duas gêmeas se complementam.”
Prof. Yoshida aborda várias questões com a estrutura, como:
Como os humanoides podem imitar a noção humana?Como os robôs podem aprender e simular comportamentos humanos?
A primeira parte da estrutura do iCPH mede o movimento humano quantificando o movimento de várias partes do corpo. Ele também registra a sequência de contatos feitos por um humano.
A estrutura permite a descrição genérica de vários movimentos por meio de equações diferenciais, bem como a geração de uma rede de movimento de contato. Um humanoide pode então agir sobre essa rede.
Quando se trata do gêmeo digital, ele aprende a rede por meio de abordagens baseadas em modelo e aprendizado de máquina. Esses dois são conectados pelo método de cálculo de gradiente analítico e o aprendizado contínuo ajuda a ensinar a simulação do robô como executar a sequência de contato.
A terceira parte do iCPH enriquece a rede de movimento de contato por meio do aumento de dados antes de aplicar o técnica de quantização vetorial. Essa técnica ajuda a extrair os símbolos que expressam a linguagem do movimento de contato, permitindo a geração de movimento de contato em situações inexperientes.
Tudo isso significa que os robôs podem explorar ambientes desconhecidos enquanto interagem com humanos usando movimentos suaves e muitos contatos.
Prof. Yoshida apresenta três desafios para o iCPH que pertencem aos descritores gerais, aprendizado contínuo e simbolização do movimento de contato. Para que o iCPH seja realizado, ele deve aprender como navegar neles*.*
“Os dados do iCPH serão tornados públicos e implantados em problemas da vida real para resolver questões sociais e industriais. Os robôs humanóides podem liberar os humanos de muitas tarefas que envolvem cargas pesadas e melhorar sua segurança, como levantar objetos pesados e trabalhar em ambientes perigosos”, diz o Prof. Yoshida. “O iCPH também pode ser usado para monitorar tarefas executadas por humanos e ajudar a prevenir doenças relacionadas ao trabalho. Por fim, os humanóides podem ser controlados remotamente por humanos por meio de seus gêmeos digitais, o que permitirá que os humanóides realizem a instalação de grandes equipamentos e o transporte de objetos.”