Le professeur Eiichi Yoshida de l’Université des sciences de Tokyo a proposé une idée intrigante d’un humain cyber-physique interactif (iCPH).
Les humains peuvent naturellement effectuer diverses tâches complexes, telles que s’asseoir et cueillir articles. Cependant, ces activités impliquent divers mouvements et nécessitent de multiples contacts, ce qui peut s’avérer difficile pour les robots. L’iCPH pourrait aider à résoudre ce problème.
Comprendre et générer des systèmes de type humain
La nouvelle plate-forme peut aider à comprendre et à générer des systèmes de type humain qui utilisent une variété de mouvements du corps entier riches en contacts.
Le travail a été publié dans Frontiers in Robotics and AI.
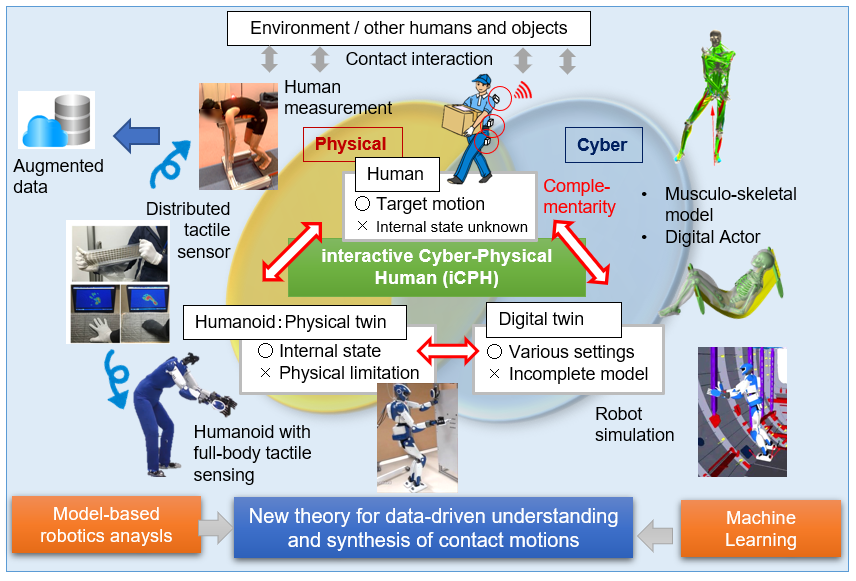
“Comme le nom suggère, iCPH combine des éléments physiques et cyber pour capturer les mouvements humains », explique le professeur Yoshida.”Alors qu’un robot humanoïde agit comme un jumeau physique d’un humain, un jumeau numérique existe en tant qu’humain ou robot simulé dans le cyberespace. Ce dernier est modélisé par des techniques telles que l’analyse musculo-squelettique et robotique. Les deux jumeaux se complètent.”
Prof. Yoshida répond à plusieurs questions avec le cadre, telles que :
Comment les humanoïdes peuvent-ils imiter la notion humaine ?Comment les robots peuvent-ils apprendre et simuler les comportements humains ?Comment les robots peuvent-ils interagir avec les humains de manière fluide et naturelle ?
Le cadre iCPH
La première partie du cadre iCPH mesure le mouvement humain en quantifiant le mouvement de diverses parties du corps. Il enregistre également la séquence de contacts effectués par un humain.
Le cadre permet la description générique de divers mouvements à travers des équations différentielles, ainsi que la génération d’un réseau de mouvements de contact. Un humanoïde peut alors agir sur ce réseau.
En ce qui concerne le jumeau numérique, il apprend le réseau par le biais d’approches basées sur des modèles et d’apprentissage automatique. Ces deux éléments sont reliés par la méthode de calcul du gradient analytique, et l’apprentissage continu aide à apprendre à la simulation du robot comment effectuer la séquence de contact.
La troisième partie de l’iCPH enrichit le réseau de mouvement de contact grâce à l’augmentation des données avant d’appliquer la technique de quantification vectorielle. Cette technique aide à extraire les symboles exprimant le langage du mouvement de contact, permettant la génération de mouvement de contact dans des situations inexpérimentées.
Tout cela signifie que les robots peuvent explorer des environnements inconnus tout en interagissant avec les humains en utilisant des mouvements fluides et de nombreux contacts.
Prof. Yoshida propose trois défis pour l’iCPH qui concernent les descripteurs généraux, l’apprentissage continu et la symbolisation du mouvement de contact. Pour que l’iCPH soit réalisé, il doit apprendre à les naviguer*.*
“Les données de l’iCPH seront rendues publiques et déployées sur des problèmes réels pour résoudre des problèmes sociaux et industriels. Les robots humanoïdes peuvent libérer les humains de nombreuses tâches impliquant de lourdes charges et améliorer leur sécurité, comme soulever des objets lourds et travailler dans des environnements dangereux », explique le professeur Yoshida. « L’iCPH peut également être utilisé pour surveiller les tâches effectuées par les humains et aider à prévenir les affections liées au travail. Enfin, les humanoïdes peuvent être contrôlés à distance par les humains via leurs jumeaux numériques, ce qui leur permettra d’entreprendre l’installation de gros équipements et le transport d’objets. »