ทีมวิศวกรที่มหาวิทยาลัย Waterloo ได้พัฒนาหุ่นยนต์ขนาดเล็กที่สามารถช่วยแพทย์ทำการผ่าตัดได้ในที่สุด หุ่นยนต์ได้รับแรงบันดาลใจจากความสามารถในการจับของตุ๊กแกและการเคลื่อนที่อย่างมีประสิทธิภาพของหนอนนิ้ว
งานวิจัยนี้ตีพิมพ์ใน รายงานเซลล์วิทยาศาสตร์กายภาพ
การเคลื่อนที่ด้วยรังสียูวีและแรงแม่เหล็ก
หุ่นยนต์ใช้รังสีอัลตราไวโอเลต (UV) แสงและแรงแม่เหล็กเพื่อเคลื่อนที่บนพื้นผิวใด ๆ รวมถึงผนังและเพดาน เป็นซอฟต์โรบ็อตตัวแรกที่ไม่ต้องการการเชื่อมต่อกับแหล่งจ่ายไฟภายนอก ซึ่งทำให้สามารถสั่งงานจากระยะไกลและใช้งานได้หลากหลาย ด้วยคุณสมบัติเหล่านี้ หุ่นยนต์จึงสามารถใช้ช่วยเหลือศัลยแพทย์และค้นหาสถานที่ที่เข้าไม่ถึงได้
ดร. Boxin Zhao เป็นศาสตราจารย์ด้านวิศวกรรมเคมี
“งานนี้เป็นครั้งแรกที่หุ่นยนต์นุ่มแบบองค์รวมได้ปีนขึ้นไปบนพื้นผิวที่กลับด้าน ซึ่งเป็นการพัฒนานวัตกรรมหุ่นยนต์นุ่มที่ล้ำสมัย” เขากล่าว “เรามองโลกในแง่ดีเกี่ยวกับศักยภาพของมัน มีการพัฒนามากขึ้นในด้านต่างๆ ที่หลากหลาย”
ทีมงานตั้งชื่อหุ่นยนต์ GeiwBot ตามชื่อสิ่งมีชีวิตที่เป็นแรงบันดาลใจในการออกแบบ สร้างด้วยวัสดุอัจฉริยะ ปรับเปลี่ยนได้ในระดับโมเลกุลเพื่อเลียนแบบวิธีการที่ตุ๊กแกยึดและถอดที่จับอันทรงพลังที่เท้าของพวกมัน
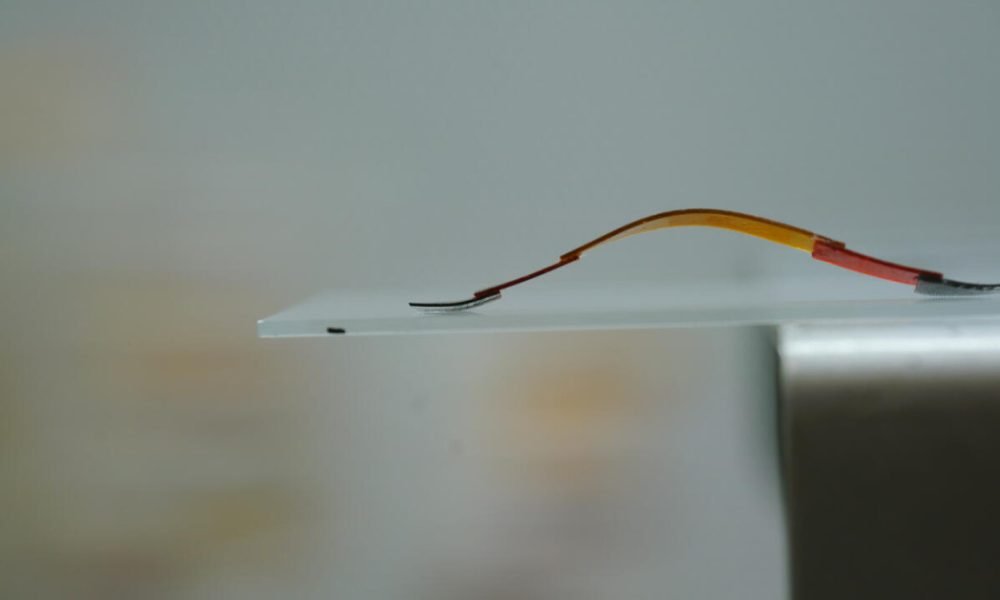
สร้างหุ่นยนต์จิ๋ว
หุ่นยนต์มีความยาวเพียง 4 เซนติเมตร กว้าง 3 มิลลิเมตร และหนา 1 มิลลิเมตร ทำให้สามารถปีนกำแพงแนวตั้งและเพดานเคลื่อนที่ได้โดยไม่ต้องใช้แหล่งพลังงาน หุ่นยนต์ถูกสร้างขึ้นโดยใช้อิลาสโตเมอร์คริสตัลเหลวและแผ่นกาวสังเคราะห์ ประกอบด้วยแถบโพลิเมอร์ที่ตอบสนองต่อแสงซึ่งเลียนแบบการโค้งงอและการยืดตัวของหนอนนิ้ว ขณะที่แผ่นแม่เหล็กที่ได้แรงบันดาลใจจากตุ๊กแกที่ปลายแต่ละด้านให้ความสามารถในการยึดจับ
Zhao ยังเป็นประธานมหาวิทยาลัยวอเตอร์ลูด้านนาโนเทคโนโลยี.
“แม้ว่าจะยังมีข้อจำกัดที่ต้องเอาชนะ แต่การพัฒนานี้ถือเป็นก้าวสำคัญสำหรับการใช้ประโยชน์จากวัสดุชีวภาพและวัสดุอัจฉริยะสำหรับหุ่นยนต์แบบอ่อน” Zhao กล่าว “ธรรมชาติคือแหล่งแรงบันดาลใจชั้นยอด และนาโนเทคโนโลยีก็เป็นวิธีที่น่าตื่นเต้นในการนำบทเรียนไปใช้”
ด้วยการพัฒนาหุ่นยนต์อ่อนที่ไม่มีการผูกมัด นักวิจัยกำลังปูทางสำหรับการประยุกต์ใช้การผ่าตัดที่มีศักยภาพผ่านการดำเนินการทางไกลภายในตัวมนุษย์ ร่างกาย. พวกเขายังช่วยสร้างเทคโนโลยีที่สามารถใช้ในการตรวจจับหรือค้นหาในสถานที่อันตรายหรือยากต่อการเข้าถึงในระหว่างปฏิบัติการกู้ภัย
ตอนนี้ทีมงานจะมองหาการพัฒนาหุ่นยนต์นุ่มสำหรับปีนเขาที่ขับเคลื่อนเพียงอย่างเดียว ด้วยแสงและไม่ต้องใช้สนามแม่เหล็ก หุ่นยนต์ตัวนี้ยังใช้รังสีอินฟราเรดใกล้แทนแสง UV ซึ่งสามารถปรับปรุงความเข้ากันได้ทางชีวภาพ